一貫した色の撮影
課題: 果物と野菜を仕分けする場合でも、スニーカーを検査する場合でも、信頼性を確保して正確な色や微細な部分を高速で撮影するには、カメラに一定の性能が求められます。
解決策:
Blackfly SそしてOryxには、最新のCMOSセンサーと先進の色アルゴリズムが組み合わされており、次の特徴を備えています:
• - あらゆる照明条件でのカラー再現を目的とするカラー補正マトリックス
• 卓越した感度とダイナミックレンジによる画像コントラストの最大化
• 精密なトリガリングによる高速での画像キャプチャ保証
精密なカラー再生
センサー反応と 光源の補正による正確なカラーの取得
Blackfly SそしてOryxによりユーザーは、可能な限り正確に色を捉えることができます。 色を高精度に再現するため、各Blackfly SそしてOryxモデルには色補正マトリックス(CCM)が内蔵されており、これによりsRGBカラープロファイル標準の色空間とより近くなるようにセンサー固有のスペクトル感度を調整します 。 アプリケーションの要件に応じて、Color Transformationの設定によってカメラのCCMを有効にすることができます。 有効にすると、 各色は、自然界での色と高い一貫性と精度で一致するように 再現 されます。
CCMによってより自然な色を作り出す一方で、 ホワイトバランス によりさまざまな光源から発せられる色を補正します。 これは光の色温度と呼ばれ、ケルビン(K)単位で表現されます。 たとえば、白熱灯の波長成分には多くの赤外線が含まれているため、カメラのホワイトバランスの青と緑は自然の色と画像のバランスを保つようにスケールアップされます。 Spinnaker SDKではホワイトバランスの値があらかじめ設定されており、タングステンでは2800K、電球色蛍光灯では3000K、白色光蛍光灯では4000K、昼光では5000K、曇り空では6500K、日陰では8000Kのようになっています。 またカスタム値を設定し、可能な限り光源に整合させることもできます。
技術的な情報の詳細は、Blackfly SそしてOryxの色変換/ホワイトバランスのページをご覧ください 。
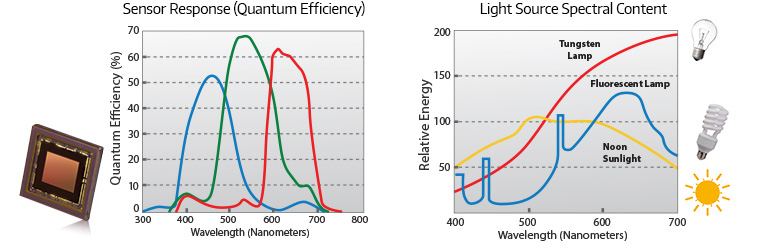
適正な色補正では、赤、緑、および青の波長に対するセンサーの感度(左側)と、
異なる光源の特定の色温度(右側)の両方を考慮します。

上記画像はタングステン(白熱)照明を使用します。
高性能カメラ画像品質
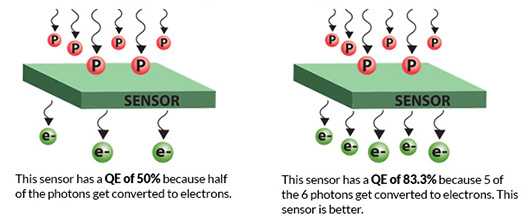
卓越した量子効率による低光量性能の向上
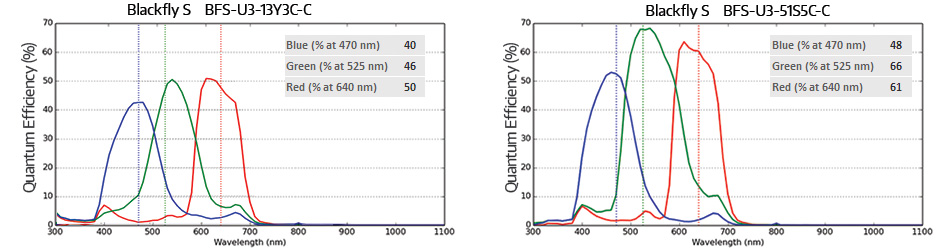
上記のとおり、センサーのスペクトル感度、つまりその 量子効率(QE)は、光を電子信号に変換するセンサーの能力を測定する方法の1つです。 色の場合は、赤、緑、および青のチャネルごとに量子効率を測定します。 QEの値が高いほど光の検出感度が高くなり、特に低光量の場合を含め、ほとんどの用途で有利です。 さらに、特定のセンサーを異なる波長レンジでより良い感度を発揮するように調整することもできます。 100%に達するセンサーはありませんが、FLIRでは、70%~80%というクラス最高のQE値を示すモノセンサーを提供しています。 カラーセンサーの光ダイオードの最上部にあるカラーフィルターは入ってくる光子のいくらかを吸収するため、そのQEはモノセンサーのQEより低くなる傾向があります。 以下の画像は、BFS-U3-13Y3CおよびBFS-U3-51S5CのEMVA 1288 QE曲線を示しています。
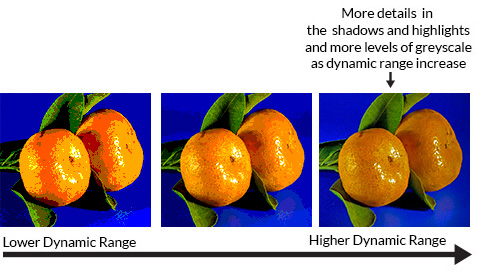
画像コントラストを最大化するハイダイナミックレンジ
ダイナミックレンジは、最大および最小の光強度(影とハイライト)を検知するカメラの能力を示します。 ハイダイナミックレンジの場合、カメラはより多くのグレースケールレベルを画像に捉えることができます。 たとえば、球形や円筒形の果物や野菜によって平面オブジェクトの場合より多くの影やハイライトが作り出される食物分類アプリケーションでは、ハイダイナミックレンジのカラーカメラモデルによりビジョンシステムでより詳細な部分を表現できます。
BFS-U3-32S4C-Cダイナミックレンジは 70.02dB
BFS-U3-51S5C-Cダイナミックレンジは 70.74 dB
高速 精密トリガリング
正確で精密なトリガリングが全てのマシンビジョンカメラについて期待されています。 ただし、アプリケーションが複雑になるにつれ、トリガーの要件とパターンも複雑になります。 FLIRのカメラを他製品と異ならせているのは、ユーザーが設定可能なトリガータイプの柔軟性の高さです。
Blackfly SそしてOryxには論理ブロックと呼ばれる独自の機能が搭載されており、カスタムトリガー構成を作成し、欠落トリガーを検出し、再トリガーして確実にすべての画像を撮影することができます。
カスタムトリガー構成の例をいくつか示します。
- 外部トリガーパルスと他の何らかのユーザー定義条件(時間の長さなど)を感知したときにカメラをトリガーします。
- カメラのトリガー準備が整い、トリガーパルスを感知しており、露光がまだ開始されていないときにトリガーします。 この構成により、カメラがトリガーする位置ではなかったときに発生したトリガーパルス(すでに露光されていた場合など)を「記憶する」ことができます。
- 論理ブロックについての詳細は、 アプリケーションノートを参照してください 。
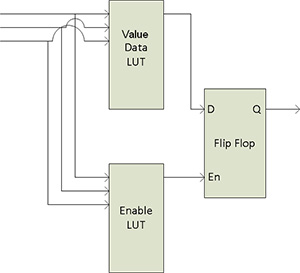
各Blackfly SそしてOryxカメラには2つの論理ブロックが搭載されています。 各論理ブロックは、入力値を構成可能な2つのルックアップテーブル(LUT)、2つの真値テーブル、およびフリップフロップ出力で構成されています。


