技術革新
1997年以降のステレオビジョン・パイオニア
1997年以来、弊社は2Dおよび3Dステレオビジョンセンサーの開発、製造市場を牽引しています。 世界初の汎用ステレオビジョンセンサーを発表して以来、多くのイノベーションを実現しました。 ハードウェアとソフトウェアのたゆみない開発により、精度、画質、キャリブレーション、サイズ、信頼性を向上させています。 弊社の豊富な経験と品質の追求によって、業界屈指の技術が製品に生かされています。耐用性に優れているので、第一世代の行動追跡および人数カウント用センサーの多くが、現在も作動し、幅広い用途で活躍しています。

1997年(左)から2017年(右)までの弊社ステレオビジョン技術の進化
技術深化
FLIR の技術について FLIR は、革新的なハードウェアとソフトウェアパッケージの開発を通じて、精度と一貫性を備えた3Dステレオビジョン技術を進化させています。こうしたパッケージには、画像修正や配置から密な相関ベースのステレオマッピングまで、総合的なステレオ処理サポートも含まれます。3Dステレオビジョンは、人間が視覚で物事を立体的に感知するのと似た方法で機能します。
まず、画像ピクセルを特定します。画像ピクセルは複数のカメラがとらえる場面の一点に相当します。 この点を各カメラからの光線を用いて三次元座標で計算すると、立体的な位置が定まります。 特定される対応ピクセルが多いほど、1枚の画像で定めることができる三次元の点も多くなります。 相関ステレオ法の狙いは、ステレオ画像における各ピクセルの対応関係を算定することにあり、各ステレオ画像を基に多数の3D値が算出されます。

3D センサーにはそれぞれ2台のカメラが装備されています。
結果、センサーによる3D 深度の算定が可能です。
3D ステレオマッピング・パイプライン
精度を保つ術:較正と修正
キャリブレーションと歪み補正 すべてのFLIR Brickstream センサーは、レンズの歪みやセンサーの誤配置をキャリブレーションした状態で工場から出荷され、センサー全体でキャリブレーションの一貫性を保っています。 歪み補正プロセス中は、エピポーララインは0.05*ピクセルのRMSエラー内に整合されます。 キャリブレーションと歪み補正は3D センサーで高品質の視差画像を取得するうえで重要な要素であり、一貫性のある正確な来場者データを各センサーから収集できるようにします。 設計上もキャリブレーションは重視され、機械的衝撃や振動から保護されるようになっています。 以下はFLIR Brickstream 3D センサーが3D ステレオの高さ画像を計算する際の技術的作業フローです。

1) 原画像
センサーの左右のカメラから原画像が撮影されます。 レンズが若干歪んでいる場合、画像にバレル歪みが生じます。

2) 修正画像
画像は、レンズの歪みがなくなるように補正されます。この画像を水平に向かい合うように並べると、 直線的な線に変化しています。

3) エッジ画像
次にエッジ強調処理を施し、画像輝度に左右されないエッジ画像を作成します。
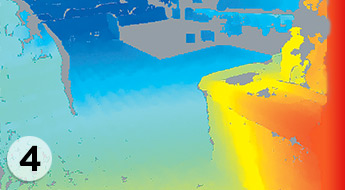
4) 3D 奥行き画像
相関関係を利用して、右画像の各ピクセルと対応するピクセルを左画像で取得します (着色による奥行き表示)