赤外線カメラの精度と不確実性についての分かりやすい説明

装置の感度や精度がどのように得られているのかを明確に理解しないと、その装置による測定値を信用することが難しくなります。そして多くの場合、赤外線サーマルカメラはそのようなカテゴリーに分類されます。 さらに、赤外線サーマルカメラの測定精度に関する議論では、分かりにくく誤解されやすい複雑な用語や専門用語が使われる場合が多いのです。 このような状況により、一部の研究者は最終的にこれらのツールを完全に使用しなくなってしまいます。 しかし、それでは赤外線を使った測定の長所を研究開発に取り入れるチャンスをみすみす逃してしまうことになります。 以下の考察では、技術用語を使わずに測定の不確実性を平易な言葉で説明し、IRカメラの校正と精度を理解するのに役立つ基礎を提供します。
カメラの精度仕様と不確実性方程式
ほとんどの赤外線カメラのデータシートには、±2℃や2%などの精度仕様が記載されています。 この仕様は、「Root-Sum-of-Squares」すなわちRSSと呼ばれ広く使用されている不確実性分析手法を適用した結果です。 考え方としては、温度測定方程式の各変数の部分誤差を計算して各誤差項を2乗し、それらをすべて加算し平方根を取ります。 この方程式は複雑に思えますが、内容的には難しくありません。 一方で、部分的なエラーに関しては誤解を招きかねない部分もあります。
典型的な赤外線カメラの 温度測定式はいくつかの変数で構成されていますが、「部分誤差」はその中の1つの変数が原因となっている場合があります。変数を以下に示します。
- 放射率
- 反射周囲温度
- 透過率
- 大気温度
- カメラの反応性
- 校正装置(黒体)の温度の精度
上記各項の「部分的な誤差」について合理的な値が決定されると、全体の誤差方程式は次のようになります。
![]()
ここで、ΔT1, ΔT2, ΔT3は測定方程式における変数の「部分誤差」です。
なぜこのような事をするのでしょうか? ランダムな誤差は場合により同じ方向に加算されて真の値から遠ざかり、また別の場合には互いに反対方向に加算されてお互いを相殺してしまいます。 RSSの値を計算すれば、全体的な誤差の仕様としては最も適した値が得られます。 これが、FLIRカメラのデータシートに歴史的に示されている仕様となります。
なお、これまで説明した計算は、カメラが実験室で使われている場合や、屋外で(20メートル未満の)短距離で使われている場合にのみ有効です。 距離が長くなると、大気による吸収の影響、また程度は低いもののその放射による影響で測定に不確実性が生じます。 実験室の条件でカメラの設計開発エンジニアがほぼすべての最新のIRカメラシステムを対象に RSS分析を行うと、結果は約±2℃または2%になります。これによりカメラの仕様としてこの数値を使うのは妥当と判断されます。
しかし一方では、FLIR X6900scのような高性能カメラを使えばFLIR E40に代表される経済的なモデルより優れた結果が得られることが経験的に示されています。この観察結果について納得できるような説明をするには私たちもう少し深く掘り下げる必要があります。
実験室での測定と±1℃または1%の精度
このセクションでは、既知の放射率と温度を持つ物体を見るときにカメラが実際に生成する温度測定値を見ていきます。 このような物体は通常「黒体」と呼ばれます。 放射率と温度が既知の物体の理論的概念と関連して、以前この言葉を聞いたことがあるかも知れません。 この言葉はまた、この概念を厳密にエミュレートする実験装置を記述するのにも使われます。 少なくとも2つの空洞型黒体の4分の1が見えるFLIRの校正研究室を以下に示します。

実験室で不確かさを測定するには、校正されたのカメラを校正された黒体に向け、ある期間にわたって温度をプロットします。 校正を注意深く行っても、測定には常にランダムな誤差が紛れ込みます。 取得したデータセットは、精度と精密度のために定量化されます。 図2は校正された黒体測定の結果です。
下の図は、屋内環境で0.3メートル離れた37℃の黒体を、FLIR A325scカメラを使い2時間以上観察して取得したデータを示しています。 カメラは1秒間に1回、温度を測定しました。 プロットしたデータは画像中のすべてのピクセルの平均値です。 このデータのヒストグラムを作成すればより明確に示せますが、データポイントのほとんどは36.8ºCと37ºCの間に集中しています。 最も幅広く分布した温度の記録は36.6℃と37.2℃でした。
このテータを見ると、全ピクセルの平均値の期待精度は0.5℃であると言いたくなります。 さらには、FLIR A325scおよび同じ検出器を使った他のカメラの精度は±0.1%であるとの主張も可能かもしれません。 しかし、同時に上記のグラフはすべてのピクセルの平均を示し、個々のピクセルを代表するものではないとの主張もあり得るでしょう。
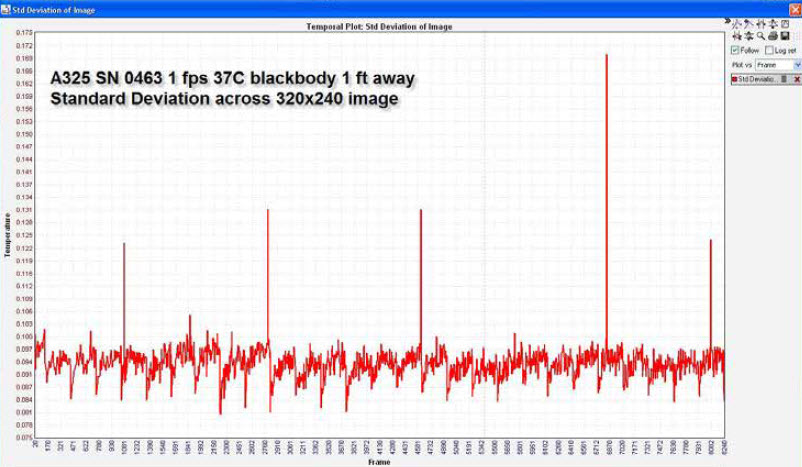
すべてのピクセルの温度が互いにどれほど一致しているかを知る1つの方法は、標準偏差対時間の関係を調べることです。 その結果を図3に示します。 時々現れる約0.2℃へのスパイクは、すべてのマイクロボロメータベースのカメラが定期的に行う自己校正手順の一種である1-point更新によるものです。
さて以上の考察では、非冷却型マイクロボロメータカメラを使ったデータ収集を対象としてきました。 高性能量子検出器カメラでは、どのように違った結果が得られるのでしょうか?
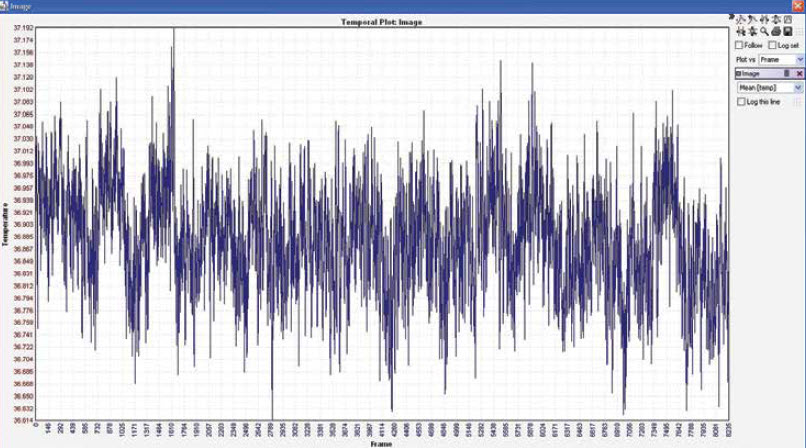
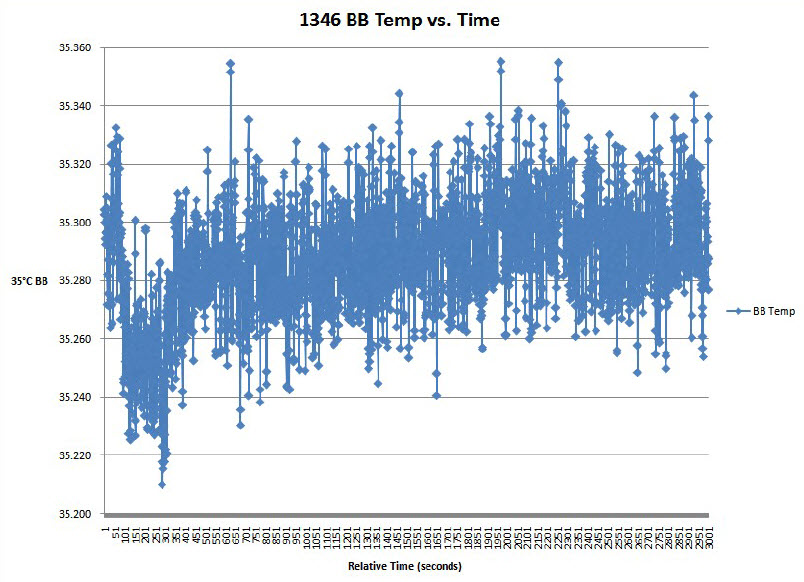
図4は、FLIR X6900scのようなアンチモン化インジウム(InSb)検出器を備えた典型的な3-5μmカメラの反応の様子を示しています。 そのカメラの資料によれば、試験したカメラの精度は±2℃または2%です。 下のグラフでは、結果がこれらの仕様の範囲内に収まっていることが分かります。その日の精度の指示値は約0.3℃、精密度の指示値は約0.1℃でした。 しかしこの0.3℃のオフセット誤差はなぜ発生するのでしょうか? これは、黒体の校正、カメラの校正、またはセクション2の部分誤差項のいずれかが原因となっているか、あるいは単に測定の開始時にカメラがウォームアップ中だったからかもしれません。 また、光学系またはカメラボディ内部で温度の変化がある場合、測定値がオフセットされることもあります。
これらの2つの校正試験から得られる結論ですが、放射率が既知の37℃の物体に対し、マイクロボロメータカメラと光子計数量子検出器カメラの両方共、標準的な屋内の環境条件下にある工場で1℃未満の精度まで校正できることになります。
大気温度の補正
工場での校正で最も重要なステップの1つは、大気温度補正です。 赤外線カメラは、赤外線検出器でも量子検出器でも、検出器に入射する赤外線エネルギーの総量に反応します。 カメラの設計が優れていれば、このエネルギーの大半は対象シーンから発せられるもので、カメラ自体からのエネルギーはほとんどありません。 しかし、検出器周辺の材料および光路からの影響を完全に排除することは不可能です。図2 – 37℃の黒体に向けた標準的なFLIR A325scカメラの反応/図3 – 37℃の黒体に向けた標準的なFLIR A325scの標準偏差/図4 – 35℃の黒体に向けた標準的なInSbカメラの反応 このため、適切な補正を施さないと、カメラボディまたはレンズの温度変化によりカメラの温度指示が大きな影響を受けることになります。
大気温度補正の最良の方法は、それぞれ異なる最大3カ所でカメラと光路の温度を測定することです。 測定したデータは校正方程式に反映されます。 これにより、全動作温度範囲(通常-15℃〜50℃)で正確な指示値を確実に得られるようになります。 これは、屋外で使用するカメラ、また温度スイングを受けるカメラには特に重要です。
なお、周囲温度補正を施した場合でも、重要な測定を行う前にはカメラを完全にウォームアップすることが大事です。 また、直射日光の当たる場所や熱源の近くにカメラや光学機器を置くことは避けてください。 カメラと光学系の温度を変えると測定の不確実性に悪い影響を与えます。
ただし、すべてのカメラメーカーがその校正プロセスで大気温度補正を行うわけではないことに注意してください。 大気温度のドリフトを適切に補正しないと、取得したデータが10℃以上の大きな不正確性を示すことがあります。 このため、IRカメラに投資する前に校正の有無とその実施方法について必ず確認してください。
測定に関する他の考慮事項
カメラの校正には直接関係しませんが、放射率やスポットサイズなどの考慮事項もカメラの精度に影響する可能性があります。 放射率設定の誤りや不適切な試験条件は、目的とする対象物の測定に際してカメラの能力に悪影響を及ぼすことになります。
放射率—赤外線エネルギーを反射するのではなく放射する物体の能力—を適切に考慮しなければなりません。 つまり、目的とする対象物の放射率を決定しその情報をカメラに入力する時間を惜しんではならない、ということです。 また、対象物が完全に反射性であるかどうかに注意を払い、もし不足していれば測定の前に措置を講じる(反射性の塗料で表面をコーティングするなど)必要もあります。 フリアーシステムズのカメラはすべて、適切な放射率を決定する手段を提供します。 もし間違えた場合でも、FLIR R&Dソフトウェアはすべて、解析中に放射率を変更することが可能です(ライブビュー時または解析後)。 通常これは画像全体または領域単位で変更することができます。
もう1つの考慮事項は、スポットのサイズまたは各ピクセルが対象物上でどれくらいの領域をカバーしているかという点です。 デフォルトの25度レンズを付けたA325scで18メートル先の火の付いたマッチを測定するものとしましょう。 各ピクセルは、全シーンの約6.5平方センチのみをカバーすることになります。 しかし、マッチの頭薬部分はせいぜい0.8平方センチ—ピクセルのカバー範囲に比べて大幅に少ない—しかありません。 ピクセルに当たる赤外線エネルギーのほぼすべては、マッチの燃えさしの後ろの領域から来たものです。 測定対象である燃えさしからの入力は全体の測定貢献入力の1/64でしかありません。 バックグラウンドが室温の場合、カメラは燃えさしの温度を過小評価して表示することになります。
この問題を解決するには望遠レンズをカメラに取り付けるか単に対象物に近づくかです。 どちらの方法でも、ピクセルサイズが燃えさしと1:1の関係になるようにできます。 絶対温度に最も近い精度で温度を測りたい場合、目標とする対象物は少なくとも10 x 10ピクセルのグリッドに完全に反映されるような大きさに設定しなければなりません。 しかし、スポットサイズを単一のピクセルまたは3 x 3ピクセルのグリッドに設定しても、真の測定値に非常に近い値が得られます。
結論
以上見てきたように、RSSによる不確実性分析手法を使うことで赤外線カメラの精度を判断することができること、またこれらのカメラは最大で2℃の誤差があることが分かりました。 適切な校正を行い、大気温度、放射率、スポットサイズなどの要因に注意すれば、予想される誤差を1℃未満に抑えることができます。
最後になりますが、この考察で紹介した情報はメーカーの工場で校正された赤外線カメラを対象にしてまとめています。 紹介した物理的過程はユーザーが行う校正にも当てはまりますが、ユーザーの校正に必要なツールと方法は対象とするシステムによって異なります。 さらに、ユーザー校正に熟達すればユーザーごとに最適化した不確実性の分析を行うことも可能で、それはこの考察で検討した一般的仕様に比べより適切なものとなるでしょう。